O. Urbann, F. Chen, J. Eßer, R. Griffin, K. Hashimoto, F. Kanehiro, P. Oh, O. Stasse and Y. Tazaki, “Humanoid Robotics: Integrating Cognitive and Physical Abilities for Human-Centered Environments [From the Guest Editors],” IEEE Robotics & Automation Magazine, vol. 32, no. 1, pp. 8-10, 2025.
J. Liu, Z. Li, M. Yu, Z. Dong, S. Calinon, D.G. Caldwell and F. Chen, “Human–Humanoid Robots’ Cross-Embodiment Behavior-Skill Transfer Using Decomposed Adversarial Learning From Demonstration,” IEEE Robotics & Automation Magazine, vol. 32, no. 1, pp. 68-78, 2025.
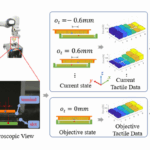
L. Xue, Q. Fu, J. Cui, F. Chen and Z. Chu, “Robotic Autonomous Snap-Fit Assembly of Flexible Printed Circuit: Mahalanobis Distance-Based Force-Tactile Contact State Perception,” IEEE Robotics and Automation Letters, vol. 10, no. 7, pp. 7142-7149, 2025.
Z. Sun, Z. Dong, S. Wang, Z. Chu and F. Chen, “A Hyperspectral Imaging Guided Robotic Grasping System,” IEEE Robotics and Automation Letters, vol. 10, no. 7, pp. 7659-7666, 2025.
Z. Li, J. Liu, Z. Li, Z. Dong, T. Teng, Y. Ou, D.G. Caldwell and F. Chen, “Language-Guided Dexterous Functional Grasping by LLM Generated Grasp Functionality and Synergy for Humanoid Manipulation,” IEEE Transactions on Automation Science and Engineering, vol. 22, pp. 10506-10519, 2025.
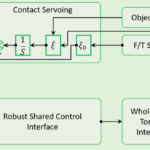
T. Teng, X. Wu, Z. Li, D.G. Caldwell and F. Chen, “Robust Shared Control With Stable Contact Servoing for Enhanced Object Transportation by Telerobotic Bimanual Mobile Manipulators,” Journal of Field Robotics, vol. 42, no. 4, pp. 1491-1507, 2025.
C. Guan, Q. Zhong and F. Chen, “Hierarchical Curriculum Learning with Optimized Experience Replay for Sample-Efficient Humanoid Locomotion,” in 2025 IEEE International Conference on Mechatronics and Automation (ICMA), pp. 1383-1388, 2025.
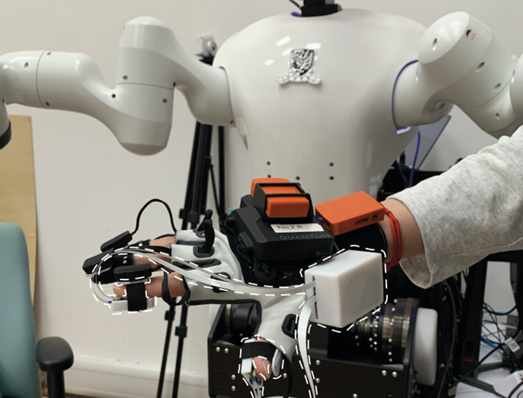
M. L. F. Padilla, Z. Tang and F. Chen, “Wearable Fluid Haptics for Enhanced Robotic Teleoperation with MANUS Quantum Metagloves,” in 2025 IEEE International Conference on Mechatronics and Automation (ICMA), pp. 1355-1359, 2025.
S. Chen, B. Tao, F. Chen, X. Li, C. Yang and R. Yang, “Focused section on new trends on intelligent automation by industrial robots,” International Journal of Intelligent Robotics and Applications, vol. 8, pp. 269-272, 2024.
Y. Hu, F. J. Abu-Dakka, F. Chen, X. Luo, Z. Li, A. Knoll and W. Ding, “Fusion dynamical systems with machine learning in imitation learning: A comprehensive overview,” Information Fusion, vol. 108, pp. 102379, 2024.
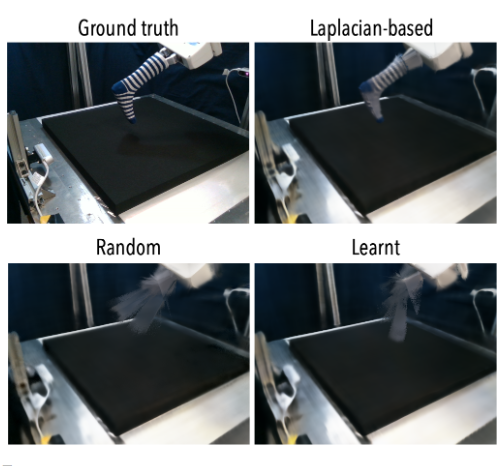
D. Delehelle, D.G. Caldwell and F. Chen, “GARField: Addressing the visual Sim-to-Real gap in garment manipulation with mesh-attached radiance fields,” in 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 77-84, 2024.
X. Wu, C. Li, K. Zou, N. Xi and F. Chen, “Muscle Activation Estimation by Optimizing the Musculoskeletal Model for Personalized Strength and Conditioning Training,” in 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 201-206, 2024.
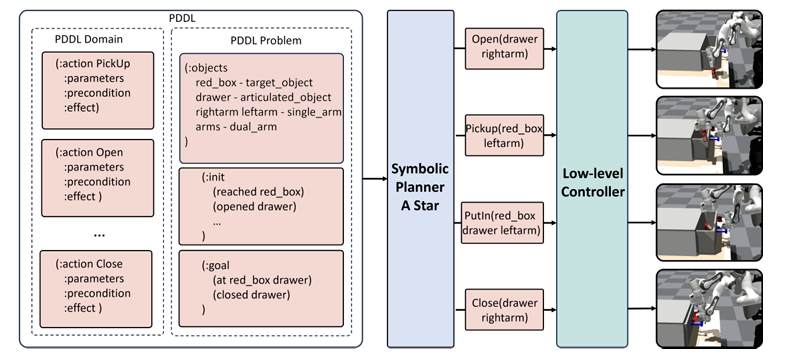
Z. Li, J. Liu, Z. Li, M. Yu, T. Teng, S. Zhou, M. Li, T. L. Lam and F. Chen, “Instruction-Following Long-Horizon Manipulation by LLM-Empowered Symbolic Planner,” in 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 913-918, 2024.
J. Liu, C. Li, S. Wang, Z. Dong, S. Calinon, M. Li and F. Chen, “Learning Goal-oriented Bimanual Dough Rolling Using Dynamic Heterogeneous Graph Based on Human Demonstration,” in 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 925-930, 2024.
C. Li, X. Wu, T. Teng, S. Calinon and F. Chen, “Towards Robo-Coach: Robot Interactive Stiffness/Position Adaptation for Human Strength and Conditioning Training,” in 2024 IEEE International Conference on Robotics and Automation (ICRA), pp. 860-866, 2024.
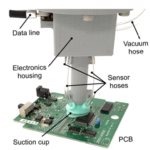
J. Lee, Z. Sun, Z. Dong, F. Chen and H. S. Stuart, “Regrasping on Printed Circuit Boards with the Smart Suction Cup,” in 2024 IEEE International Conference on Robotics and Automation (ICRA), pp. 6477-6483, 2024.
M. L. F. Padilla, Z. Dong and F. Chen, “Flexible Force-sensitive Sealed Packet with Single Fluidic Chamber,” in 2024 IEEE 3rd International Conference on Micro/Nano Sensors for AI, Healthcare, and Robotics (NSENS), pp. 1-4, 2024.
W. J. Li, Z. Li, J. Liu, Z. Dong, Z. Sun and F. Chen, “Humanoid Pianist: Dexterous Piano Playing with Synergy-based Hand Representation*,” in 2024 IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO), pp. 31-36, 2024.
W. Chen, Y. Lu, B. Li, J. Zhou, H. Cao and F. Chen, “Intuitive Teleoperation Control for Flexible Robotic Endoscopes Under Unkonwn Environmental Interferences,” in 2024 IEEE 18th International Conference on Control & Automation (ICCA), pp. 24-29, 2024.
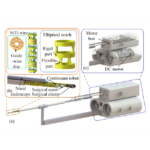
T. Li, J. Li, J. Wang, Y. Xu, F. Chen and Y. Tan, “Design and Modeling of a Flexible Surgical Robot for Transnasal Pituitary Tumor Surgery,” in 2024 International Conference on Intelligent Robotics and Applications (ICIRA), pp. 144-159, 2024.
C. Tian, Z. Huang, H. Li and F. Chen, “Analysis of the Velocity of Two-Layer Generalized Parallel Manipulators,” in 2024 IEEE International Conference on Mechatronics and Automation (ICMA), pp. 1694-1699, 2024.
M. Yu, Z. Li, Z. Li, J. Liu, T. Teng and F. Chen, “A Deep Learning-based Grasp Pose Estimation Approach for Large-Size Deformable Objects in Clutter,” in 2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN), pp. 285-290, 2024.
M. L. F. Padilla, Z. Dong and F. Chen, “Flexible Force-sensitive Sealed Packet with Single Fluidic Chamber,” in 2024 IEEE 3rd International Conference on Micro/Nano Sensors for AI, Healthcare, and Robotics (NSENS), pp. 1-4, 2024.
T. Teng, M. Gatti, S. Poni, D.G. Caldwell and F. Chen, “Fuzzy Dynamical System for Robot Learning Motion Skills from Human Demonstration,” Robotics and Autonomous Systems, vol. 164, pp. 104406, 2023.
G. Paolo, M. Fernandes, F. Chen, Alessandro Santamaria, Tao Teng, Tommaso Frioni, D. G. Caldwell, Stefano Poni, C. Semini, and Matteo Gatti, “Using deep learning for pruning region detection and plant organ segmentation in dormant spur-pruned grapevines,” Precision Agriculture, pp. 1-23, 2023.
C. Rizzardo, F. Chen and D.G. Caldwell, “Sim-to-real via latent prediction: Transferring visual non-prehensile manipulation policies,” Frontiers in Robotics and AI, vol. 9, 2023.
J. Liu, Z. Li, W. Lin, S. Calinon, K. C. Tan and F. Chen, “SoftGPT: Learn Goal-Oriented Soft Object Manipulation Skills by Generative Pre-Trained Heterogeneous Graph Transformer,” in 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 4920-4925, 2023.
Y. Chen, J. Jiang, R. Lei, B. Yasemin, F. Chen and M. Li, “GraspAda: Deep Grasp Adaptation through Domain Transfer,” in 2023 IEEE International Conference on Robotics and Automation (ICRA), pp. 10268-10274, 2023.
J. Liu, H. Sim, C. Li, K. C. Tan and F. Chen, “BiRP: Learning Robot Generalized Bimanual Coordination Using Relative Parameterization Method on Human Demonstration,” in 2023 62nd IEEE Conference on Decision and Control (CDC), pp. 8300-8305, 2023.
Z. Lei, X. Deng, Y. Wang, Z. Li, X. Xiao, D. Han, F. Chen and M. Li, “A Biomimetic Tactile Palm for Robotic Object Manipulation,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 11500-11507, 2022.
S. Calinon, F. Chen, M. Li, N. Figueroa, H. Yin, J. Silverio and A. Billard, “Call for Papers Focused Section on Design, Modeling, Learning and Control for Bimanual Manipulation Mechatronics,” IEEE/ASME Transactions on Mechatronics, vol. 27, no. 3, pp. 1813-1814, 2022.
Z. Dong, Z. Li, Y. Yan, S. Calinon and F. Chen, “Passive Bimanual Skills Learning From Demonstration With Motion Graph Attention Networks,” IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4917-4923, 2022.
J. Liu, Y. Chen, Z. Dong, S. Wang, S. Calinon, M. Li and F. Chen, “Robot Cooking with Stir-fry: Bimanual Non-prehensile Manipulation of Semi-fluid Objects,” IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5159-5166, 2022.
Z. Dong, H. Tian, X. Bao, Y. Yan and F. Chen, “GraspVDN: scene-oriented grasp estimation by learning vector representations of grasps,” Complex & Intelligent Systems, vol. 8, no. 4, pp. 2911-2922, 2022.
Q. Li, C. Liu, C. Yang, F. Chen and H. Ritter, “Robotic dexterous manipulation: from tele-operation to autonomous learning and adaptive control,” Complex & Intelligent Systems, vol. 8, no. 4, pp. 2809-2811, 2022.
Z. Sun, Z. Wang, J. Liu, M. Li and F. Chen, “Mixline: A Hybrid Reinforcement Learning Framework for Long-Horizon Bimanual Coffee Stirring Task,” in International Conference on Intelligent Robotics and Applications (ICIRA), pp. 627-636, 2022.
J. Jiang, X. Xiao, F. Chen and M. Li, “Learning grasp ability enhancement through deep shape generation,” in International Conference on Intelligent Robotics and Applications (ICIRA), pp. 735-746, 2022.
Z. Li, S. Zheng, Z. Dong, M. Li and F. Chen, “Human Inspired Robot Learning to Search Objects in Cluttered Environments Using Maximum Information-based Method,” in International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), pp. 31-36, 2022.
S. Katyara, F. Ficuciello, D.G. Caldwell, B. Siciliano and F. Chen, “Leveraging kernelized synergies on shared subspace for precision grasping and dexterous manipulation,” IEEE Transactions on Cognitive and Developmental Systems, 2021.
Z. Dong, Y. Gao, Y. Yan and F. Chen, “Vector detection network: An application study on robots reading analog meters in the wild,” IEEE Transactions on Artificial Intelligence, vol. 2, no. 5, pp. 394-403, 2021.
H. Gao, Z. Kan, F. Chen, Z. Hao, X. He, H. Su and K. Li, “Adaptive finite-time trajectory tracking control of autonomous vehicles that experience disturbances and actuator saturation,” IEEE Intelligent Transportation Systems Magazine, vol. 14, no. 2, pp. 80-91, 2021.
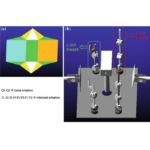
W. He, J. Li, Z. Yan and F. Chen, “Bidirectional Human-Robot Bimanual Handover of Big Planar Object With Vertical Posture,” IEEE Transactions on Automation Science and Engineering, vol. 19, no. 2, pp. 1180-1191, 2021.
X. Deng, Y. Chen, F. Chen and M. Li, “Learning robotic ultrasound scanning skills via human demonstrations and guided explorations,” in 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 372-378, 2021.
M. Fernandes, A. Scaldaferri, G. Fiameni, T. Teng, M. Gatti, S. Poni, C. Semini, D.G. Caldwell and F. Chen, “Grapevine winter pruning automation: On potential pruning points detection through 2d plant modeling using grapevine segmentation,” in 2021 IEEE 11th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), pp. 13-18, 2021.
T. Teng, M. Fernandes, M. Gatti, S. Poni, C. Semini, D.G. Caldwell and F. Chen, “Whole-body control on non-holonomic mobile manipulation for grapevine winter pruning automation,” in 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), pp. 37-42, 2021.
S. Katyara, F. Ficuciello, F. Chen, B. Siciliano and D.G. Caldwell, “Vision based adaptation to kernelized synergies for human inspired robotic manipulation,” in 2021 IEEE International Conference on Robotics and Automation (ICRA), pp. 6491-6497, 2021.
S. Katyara, F. Ficuciello, D.G. Caldwell, F. Chen and B. Siciliano,”Reproducible pruning system on dynamic natural plants for field agricultural robots,” in International Workshop on Human-Friendly Robotics 2020, pp. 1-15, 2021.
M. Li, Z. Yang, F. Zha, X. Wang, P. Wang, P. Li, Q. Ren and F. Chen, “Design and analysis of a whole-body controller for a velocity controlled robot mobile manipulator,” Science China Information Sciences, vol. 63, no. 7, pp. 1-15, 2020.
S. Qiu, W. Guo, D.G. Caldwell and F. Chen, “Exoskeleton online learning and estimation of human walking intention based on dynamical movement primitives,” IEEE Transactions on Cognitive and Developmental Systems, vol. 13, no. 1, pp. 67-79, 2020.
S. Qiu, W. Guo, F. Zha, X. Wang, W. Sheng, F. Chen and D.G. Caldwell, “Conditions for active assistance control of exoskeleton robot,” in 2020 5th International Conference on Advanced Robotics and Mechatronics (ICARM), pp. 220-227, 2020.
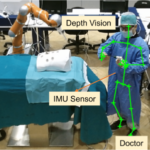
W. Qi, H. Su, F. Chen, X. Zhou, Y. Shi, G. Ferrigno and E. De Momi, “Depth Vision Guided Human Activity Recognition in Surgical Procedure using Wearable Multisensor,” in 2020 5th International Conference on Advanced Robotics and Mechatronics (ICARM), pp. 431-436, 2020.
M. Li, Z. Yang, F. Zha, X. Wang, P. Wang, W. Guo, D.G. Caldwell and F. Chen, “Pattern Analysis and Parameters Optimization of Dynamic Movement Primitives for Learning Unknown Trajectories,” in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 8316-8322, 2020.
C. Rizzardo, S. Katyara, M. Ferandes and F. Chen,, “The Importance and the Limitations of Sim2Real for Robotic Manipulation in Precision Agriculture,” in Robotics: Science and Systems (RSS2020), 2020.
Z. Li, F. Chen, A. Bicchi, Y. Sun and T. Fukuda, “Guest editorial neuro-robotics systems: Sensing, cognition, learning, and control,” IEEE Transactions on Cognitive and Developmental Systems, vol. 11, no. 2, pp. 145-147, 2019.
W. Guo, S. Qiu, F. Zha, J. Deng, X. Wang and F. Chen, “A novel active balance assistive control strategy based on virtual stiffness model of XCoM,” Assembly Automation, vol. 40, no. 1, pp. 132-142, 2019.
F. Zha, W. Sheng, W. Guo, S. Qiu, X. Wang and F. Chen, “The exoskeleton balance assistance control strategy based on single step balance assessment,” Applied Sciences, vol. 9, no. 5, pp. 884, 2019.
J. Li, Z. Li, F. Chen, A. Bicchi, Y. Sun and T. Fukuda, “Combined sensing, cognition, learning, and control for developing future neuro-robotics systems: a survey,” IEEE Transactions on Cognitive and Developmental Systems, vol. 11, no. 2, pp. 148-161, 2019.
S. Qiu, W. Guo, P. Wang, F. Chen, F. Zha, X. Wang and J. Deng, “A unified active assistance control framework of hip exoskeleton for walking and balance assistance,” in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 8185-8192, 2019.
C. Li, Q. Ren, F. Chen and P. Li, “Vision-based formation control of a heterogeneous unmanned system,” in IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, pp. 5299-5304, 2019.
J. Li, J. Zhong, F. Chen and C. Yang, “An incremental learning framework for skeletal-based hand gesture recognition with leap motion,” in 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), pp. 13-18, 2019. (Best Paper Award Finalist)
W. Liang, J. Cao, H. Chi, Y. You, F. Chen and Q. Ren, “Design and Motion Control of Antagonistic Soft Actuators,” in 2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), pp. 1617-1622, 2019.
Z. Dong, Y. Gao, Q. Ren, Y. Yan and F. Chen, “Depth Generation Network: Estimating Real World Depth from Stereo and Depth Images,” in 2019 International Conference on Robotics and Automation (ICRA), pp. 7201-7206, 2019.
F. Zha, Y. Liu, X. Wang, F. Chen, J. Li and W. Guo, “Robot motion planning method based on incremental high-dimensional mixture probabilistic model,” Complexity, vol. 2018, 2018.
M. Li, R. Guo, F. Zha, F. Chen and J. Huang,”Control method for the balance recovery of indirect tight coordination task based on force sensor,” in 2018 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO), 2018, pp. 15-20.
M. Zhang, J. Huang and F. Chen,”Super twisting control algorithm for Velocity Control of Mobile Wheeled Inverted Pendulum Systems,” in 2018 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO), 2018, pp. 3-8.
Z. Dong, Y. Gao, J. Zhang, Y. Yan, X. Wang and F. Chen, “HoPE: Horizontal plane extractor for cluttered 3D scenes,” Sensors, vol. 18, no. 10, pp. 3214, 2018.
M. Li, J. Deng, F. Zha, S. Qiu, X. Wang and F. Chen, “Towards online estimation of human joint muscular torque with a lower limb exoskeleton robot,” Applied Sciences, vol. 8, no. 9, pp. 1610, 2018.
F. Zha, H. Li, P. Wang, F. Chen and X. Wang, “The Analysis of Alternating SLIP Model on Spinal Quadruped Robot in Bounding Gait,” in 2018 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), pp. 420-425, 2018.
W. Guo, F. Zhu, F. Zha, X. Wang and F. Chen, “A novel single step balance assessment method based on swing foot chasing capture point,” in 2018 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), pp. 443-450, 2018.
Z. Li, T. Zhao, F. Chen, Y. Hu, C. Y. Su and T. Fukuda, “Reinforcement learning of manipulation and grasping using dynamical movement primitives for a humanoidlike mobile manipulator,” IEEE/ASME Transactions on Mechatronics, vol. 23, no. 1, pp. 121-131, 2017.
W. Ye, Z. Li, C. Yang, F. Chen and C. Y. Su, “Motion detection enhanced control of an upper limb exoskeleton robot for rehabilitation training,” International journal of humanoid robotics, vol. 14, no. 01, pp. 1650031, 2017.
M. Selvaggio, S. Grazioso, G. Notomista and F. Chen, “Towards a self-collision aware teleoperation framework for compound robots,” in 2017 IEEE World Haptics Conference (WHC), pp. 460-465, 2017.
F. Chen, F. Cannella, J. Huang, H. Sasaki and T. Fukuda, “A study on error recovery search strategies of electronic connector mating for robotic fault-tolerant assembly,” Journal of Intelligent & Robotic Systems, vol. 81, no. 2, pp. 257-271, 2016.
F. Cannella, M. Dimperio, C. Canali, N. Rahman, F. Chen, D. Catelani, D.G. Caldwell and J. S. Dai,”Origami carton folding analysis using flexible panels,” in Advances in Reconfigurable Mechanisms and Robots II, 2016, pp. 95-106.
F. Chen, L. Carbonari, C. Canali, M. D’Imperio and F. Cannella, “Design of a novel dexterous robotic gripper for in-hand twisting and positioning within assembly automation,” Assembly Automation, 2015.
F. Chen, Q. Zhong, F. Cannella, K. Sekiyama and T. Fukuda, “Hand gesture modeling and recognition for human and robot interactive assembly using hidden markov models,” International Journal of Advanced Robotic Systems, vol. 12, no. 4, pp. 48, 2015.
F. Cannella, F. Chen, C. Canali, A. Eytan, A. Bottero and D.G. Caldwell, “Design of an industrial robotic gripper for precise twisting and positioning in high-speed assembly,” in Proceedings of the 2013 IEEE/SICE International Symposium on System Integration, 2013, pp. 443-448.
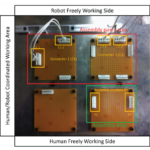
F. Chen, K. Sekiyama, F. Cannella and T. Fukuda, “Optimal subtask allocation for human and robot collaboration within hybrid assembly system,” IEEE Transactions on Automation Science and Engineering, vol. 11, no. 4, pp. 1065-1075, 2013.
F. Chen, K. Sekiyama, B. Sun, P. Di, J. Huang, H. Sasaki and T. Fukuda, “Design and application of an intelligent robotic gripper for accurate and tolerant electronic connector mating,” Journal of Robotics and Mechatronics, vol. 24, no. 3, pp. 441, 2012.
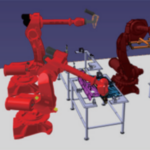
F. Chen, K. Sekiyama, J. Huang, B. Sun, H. Sasaki and T. Fukuda, “An assembly strategy scheduling method for human and robot coordinated cell manufacturing,” International Journal of Intelligent Computing and Cybernetics, 2011.
C. Yang, R. Yang, J. Na and F. Chen, “Adaptive RBFNN control of robot manipulators with finite-time convergence,” in IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, pp. 42-47, 2016.
M. Selvaggio, G. Notomista, F. Chen, B. Gao, F. Trapani and D.G. Caldwell, “Enhancing bilateral teleoperation using camera-based online virtual fixtures generation,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1483-1488, 2016.
C. Yang, J. Chen and F. Chen, “Neural learning enhanced teleoperation control of Baxter robot using IMU based motion capture,” in 2016 22nd International Conference on Automation and Computing (ICAC), pp. 389-394, 2016.
M. Liu, X. Zhong, X. Wang, F. Chen, F. Zha and W. Guo, “Motion control for a single-legged robot,” in 2016 International Conference on Advanced Robotics and Mechatronics (ICARM), pp. 336-341, 2016.
M. Li, M. Zhang, Y. Fu, W. Guo, X. Zhong, X. Wang and F. Chen, “Fast and robust mapping with low-cost Kinect V2 for photovoltaic panel cleaning robot,” in 2016 International Conference on Advanced Robotics and Mechatronics (ICARM), pp. 95-100, 2016.
B. Gao, F. Chen, F. Trapani, M. Selvaggio and D.G. Caldwell, “Robust object localization based on error patterns learning for dexterous mobile manipulation,” in 2016 International Conference on Advanced Robotics and Mechatronics (ICARM), pp. 213-218, 2016.
M. Selvaggio, F. Chen, B. Gao, G. Notomista, F. Trapani and D.G. Caldwell, “Vision based virtual fixture generation for teleoperated robotic manipulation,” in 2016 International Conference on Advanced Robotics and Mechatronics (ICARM), pp. 190-195, 2016.
F. Chen, B. Gao, M. Selvaggio, Z. Li, D.G. Caldwell, K. Kershaw, A. Masi, M. Di Castro and R. Losito, “A framework of teleoperated and stereo vision guided mobile manipulation for industrial automation,” in 2016 IEEE International Conference on Mechatronics and Automation, pp. 1641-1648, 2016. (Best Automation Paper Award Finalist)
N. Rahman, M. D’Imperio, L. Carbonari, F. Chen, C. Canali, D.G. Caldwell and F. Cannella, “A novel bio-inspired modular gripper for in-hand manipulation,” in 2015 IEEE international conference on robotics and biomimetics (ROBIO), pp. 7-12, 2015.
F. Chen, F. Cannella, C. Canali, M. D’Imperio, T. Hauptman, G. Sofia and D.G. Caldwell, “A study on data-driven in-hand twisting process using a novel dexterous robotic gripper for assembly automation,” in 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 4470-4475, 2014.
F. Chen, F. Cannella, H. Sasaki, C. Canali and T. Fukuda, “Error recovery strategies for electronic connectors mating in robotic fault-tolerant assembly system,” in 2014 IEEE/ASME 10th International Conference on Mechatronic and Embedded Systems and Applications (MESA), pp. 1-6, 2014.
C. Canali, F. Cannella, F. Chen, G. Sofia, A. Eytan and D.G. Caldwell, “An automatic assembly parts detection and grasping system for industrial manufacturing,” in 2014 IEEE International Conference on Automation Science and Engineering (CASE), pp. 215-220, 2014.
C. Canali, F. Cannella, F. Chen, T. Hauptman, G. Sofia, D.G. Caldwell and A. A. Eytan, “High reconfigurable robotic gripper for flexible assembly,” in International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC-CIE), pp. 08A-019, 2014.
M. D’Imperio, F. Cannella, F. Chen, D. Catelani, C. Semini and D.G. Caldwell, “Modelling legged robot multi-body dynamics using hierarchical virtual prototype design,” in Conference on biomimetic and biohybrid systems, pp. 59-71, 2014.
F. Chen, F. Cannella, C. Canali, T. Hauptman, G. Sofia and D.G. Caldwell, “In-hand precise twisting and positioning by a novel dexterous robotic gripper for industrial high-speed assembly,” in 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 270-275, 2014.
F. Chen, F. Cannella, C. Canali, A. Eytan, A. Bottero and D.G. Caldwell, “Theoretical and kinematic solution of high reconfigurable grasping for industrial manufacturing,” in 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 734-739, 2013.
F. Chen, K. Sekiyama and T. Fukuda, “1A2-U09 Human Hand Gesture Monitoring for Robot in Human and Robot Coordinated Hybrid Cell Assembly (Cooperation between Human and Machine (2)),” in The Proceedings of JSME annual Conference on Robotics and Mechatronics (Robomec) 2012, pp. 1A2-U09, 2012.
F. Chen, K. Sekiyama, P. Di, J. Huang and T. Fukuda, “i-hand: An intelligent robotic hand for fast and accurate assembly in electronic manufacturing,” in 2012 IEEE International Conference on Robotics and Automation (ICRA), pp. 1976-1981, 2012.
T. Fukuda, P. Di, F. Chen, K. Sekiyama, J. Huang, M. Nakajima and M. Kojima, “Advanced service robotics for human assistance and support,” in 2011 International Conference on Advanced Computer Science and Information Systems, pp. 25-30, 2011.
B. SUN, P. DI, F. CHEN, J. HUANG, H. SASAKI and T. FUKUDA, “1A2-B12 Robotic Assembly System for Electric Connectors Mating Basing on Vision and Force/Toraue Sensors,” in The Proceedings of JSME annual Conference on Robotics and Mechatronics (Robomec) 2010, pp. 1A2-B12, 2010.