As the rapid development of using reinforced learning in robot manipulation, its’ success depends heavily on the scale of large dataset which doesn’t exist especially in long-horizon bimanual manipulation tasks and collecting these datasets are time-consuming and constrained by experiment equipment and environments. So, we proposed a data augmentation and generation method for robot manipulation tasks to advance reinforced learning from toy tasks to complex tasks and to create millions of high-fidelity visual and tactile data for both long-term planning and sophisticated low-level control.
Overview of Interactive Simulation Platform: Playground.
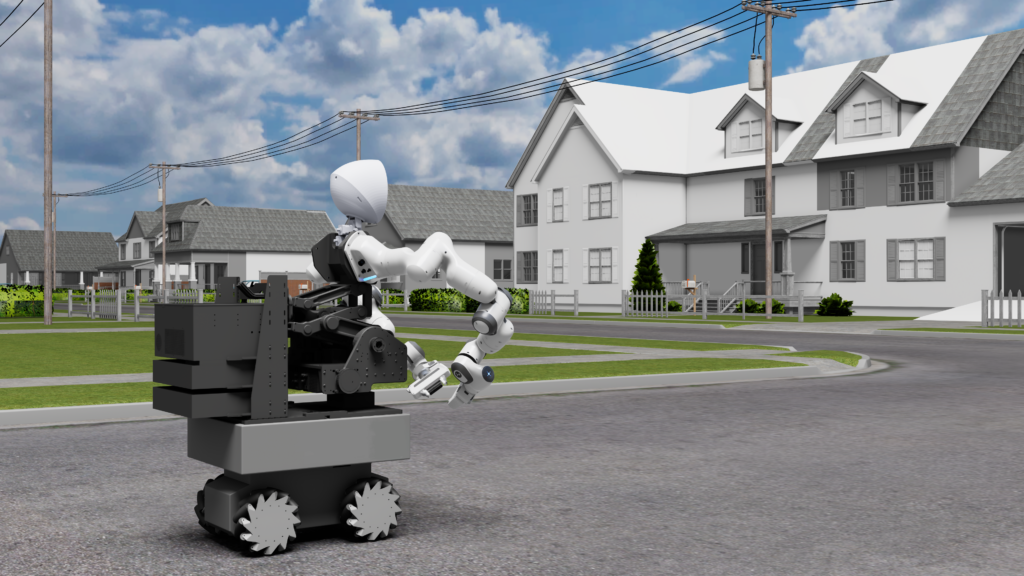
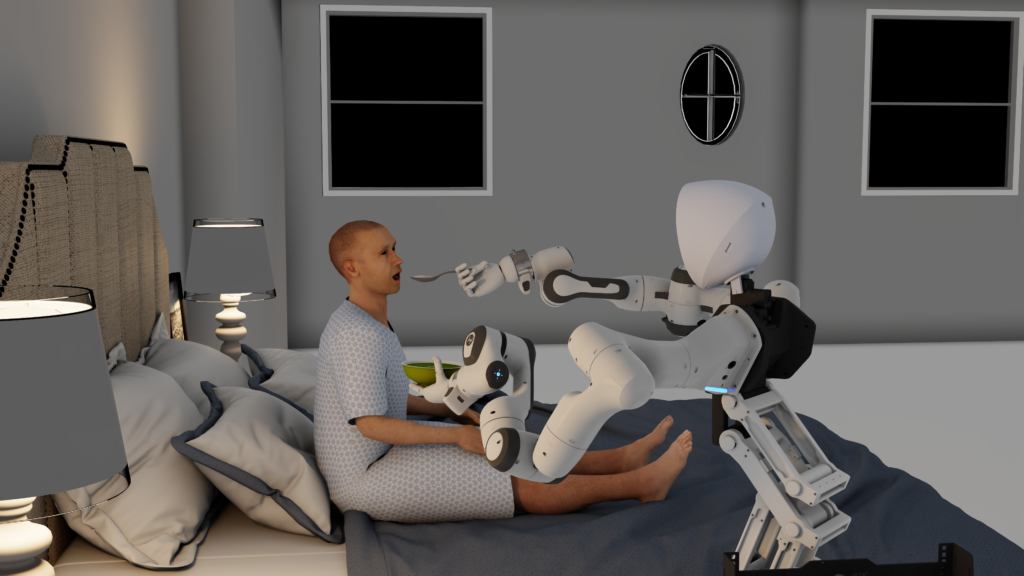
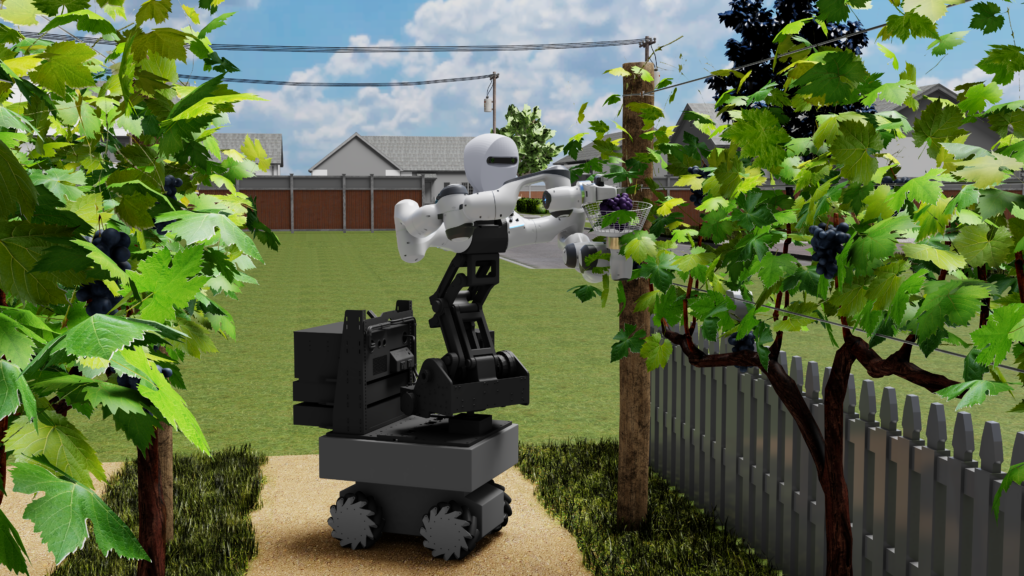
Research 1 : Multi-scenarios Playground for Robots
We provide the simulation platform for robots’ tasks under 8 different scenarios. The scenarios contain of Nearby town, Store, Garage, Kitchen, Living room, Storage room, Bedroom, Vineyard, Orchard. Each secne contains: