Fei Chen, Assistant Professor, T-Stone Robotics Institute, The Chinese University of Hong Kong, Hong Kong SAR | Department of Advanced Robotics, Italian Institute of Technology, Italy. Email: f.chen [at] ieee.org (main contact)
Sylvain Calinon, Senior Researcher, Idiap Research Institute, Switzerland. Email: sylvain.calinon [at] idiap.ch
Nadia Figueroa, Shalini and Rajeev Misra Presidential Assistant Professor, University of Pennsylvania, USA. Email: nadiafig [at] mit.edu
Jihong Zhu, Post-doc, TU Delft/Honda Research Institute Europe, Netherlands/Germany. Email: j.zhu-3 [at] tudelft.nl
Maria Bauza Villalonga, PhD, Massachusetts Institute of Technology, USA. Email: bauza [at] mit.edu
Objectives
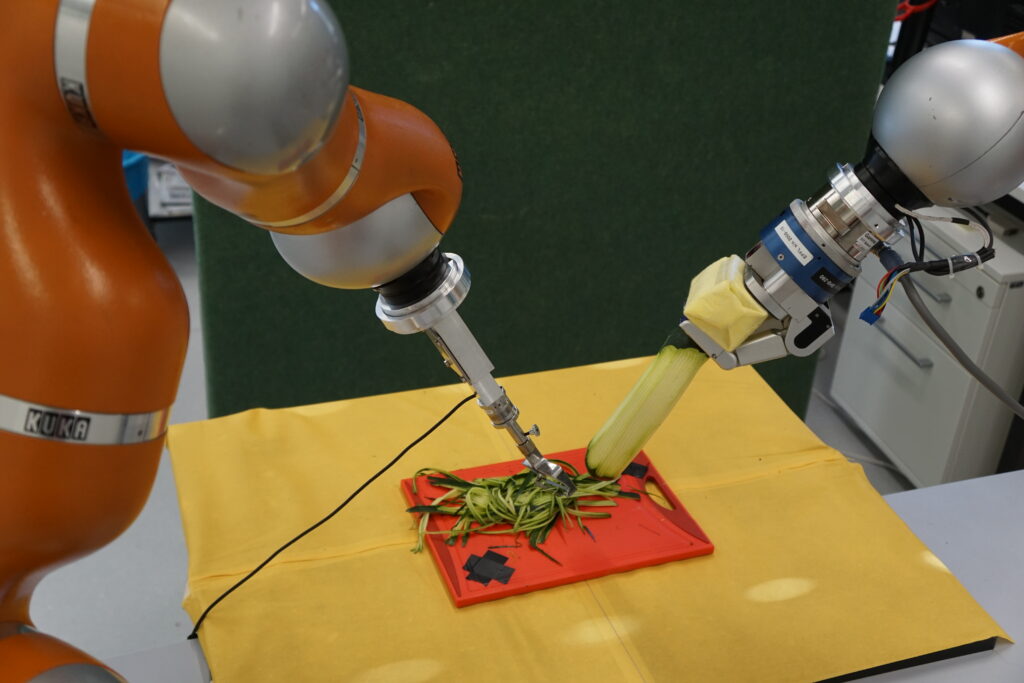
Bimanual manipulation is essential for robots to reach human level manipulation dexterity. The involvement of the second robot arm is believed to greatly increase the dexterity and flexibility of robot manipulation and therefore to open new directions for both research and real world applications. But it is still a problem to identify the challenges in general and in modules which have slowed down or blocked this kind of novelty benefiting human beings? It is clear that we cannot focus on solving purely issues at the components level. We need a holistic, interdisciplinary perspective of robotic bimanual manipulation. Therefore it is important for roboticists from both academic and industrial community to join efforts together to review, re-investigate, reshape and pave the way to advance the field of research. To navigate our discussion, we prepared the following question to be answered in the workshop.
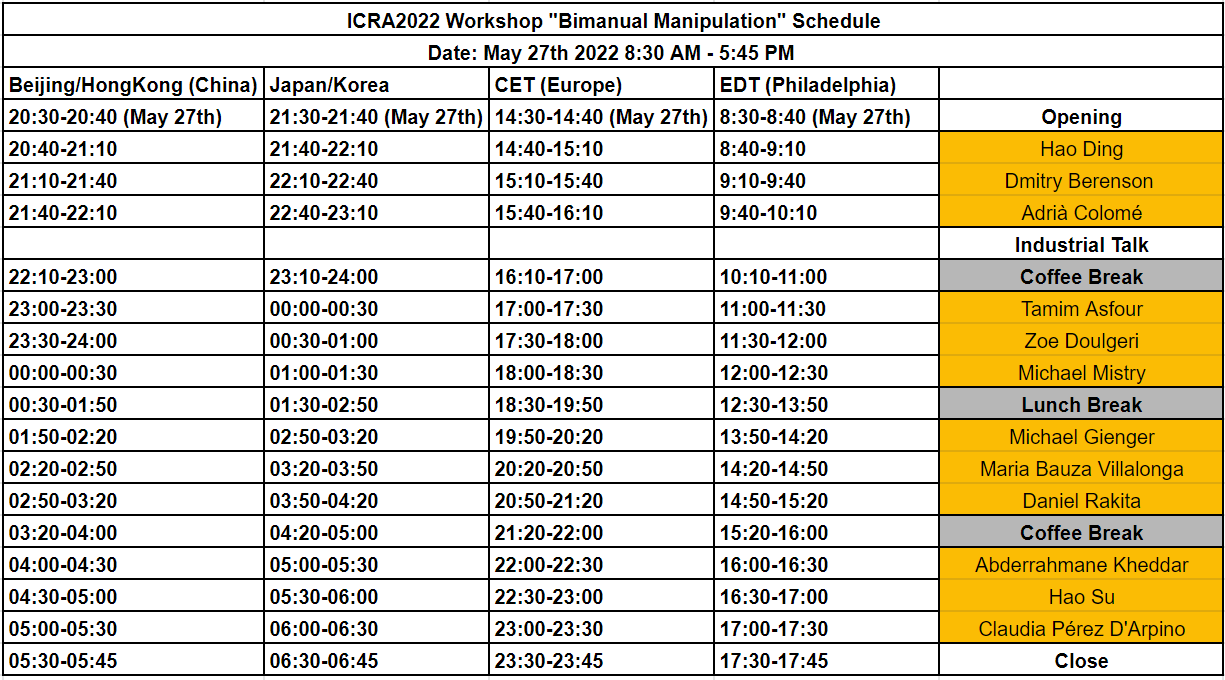
Workshop Recording
1. Hao Ding - Optimized Task Distribution for Industrial Assembly in Mixed Human-Robot Environments
2. Dmitry Berenson - Learning for Bimanual Manipulation of Deformable Objects
3. Adrià Colomé - Learning and Benchmarking Bimanual Cloth Manipulation
4. Qiuyue Luo - UBTech Humanoid Robot Platform Walker
5. Tamim Asfour -Learning and Executing Bimanual Manipulation Tasks