
Facilities_Details

CURI Robot
The Collaborative Dual-arm Robot Manipulator (CURI) is the prime research platform developed in our lab. The hardware of CURI consists of four parts: a head, two arms, a torso, and a mobile chassis:
- Head: the mellow head is embedded with an RGB-D camera for perception.
- Arms: two arms are able to interact and collaborate with human compliant with high-sensitivity force control capability.
- Torso: the self-designed torso with a payload of 80 kg can achieve 3-DoF translational motion and rotation.
- Mobile chassis: the mobile platform with a payload of 250 kg can navigate omnidirectionally with a laser scanner.
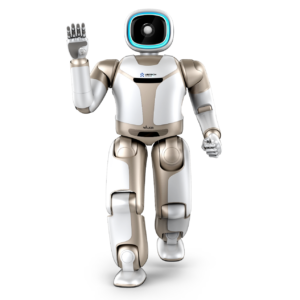
CUHK-UBTECH Walker
Our lab has collaborated with UBTECH in developing cutting-edge humanoid technologies since founding the lab in 2019. We now own one of the few Walker robots distributed to higher education universities and it is also the only one shipped to oversea university.
CUHK-UBTECH Walker initiative is a collaboration between CUHK CLOVER Lab and UBTECH, with shared interest and mission to bring robots into every home to perform advanced locomotion and manipulation tasks.
With 36 high-performance servo joints and a full range of sensory systems including force, vision, hearing and spatial awareness, Walker enables smooth and fast walking and flexible, precise handling, with the ability to move and serve freely in common home and office scenarios.

QKM Apollo
- All-in-one design, excellent hardware technology and mature application system software make it as an expert in high-speed sorting.
- Large working space, high speed and stability.
- All-in-one design without separate control cabinet.
- Protection class up to IP65.

NACHi MZ04
- Hand cables are neatly housed inside of the hollow wrist. Smart cable routing helps prevent interference with peripheral equipment, which greatly improves equipment reliability.
- The lightweight and compact robot arm helps keep the equipment simple and saves space.
- The installation area is half that of the MZ07 (A5 paper size).
- Perfect for any application: Machine Loading, Assembling, Packing/Casing, Inspection, Deburring, Finishing, Picking, Sealing.

Franka Emika Panda
The force sensitive and agile Arm features 7 DOF with torque sensors at each joint, industrial-grade pose repeatability of +/- 0.1 mm and negligible path deviation even at high velocities. It comes with a payload of 3 kg, a reach of 855 mm and a workspace coverage of 94.5 %.

MiNTASCA Gluon
High-performance desktop-level multi-axis robot, all joints are built with QDD Lite series actuators. The maximum range of its arm length is 430mm, and the end load is 500g. Because the QDD Lite series actuators use composite materials, the research and development costs of high-end robots are greatly reduced, and they are mainly used in the field of education, schools, laboratories, research institutes, competitions, etc.
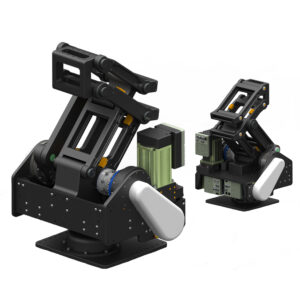
CLOVER 3-DOF High Payload Arm
This high payload arm is designed by our lab and currently used as CURI's torso. It comprises three actuators and aluminum alloy links. Its total weight is 40 kg and has a payload of 80 kg. It can achieve 2-DoF translational motion in the X-Z plane through two combined four-link mechanisms and rotate around the Z-axis.

qb SoftHand2 Research
The qb SoftHand2 Research is the stronger, smarter and more versatile evolution of qb SoftHand Research: an anthropomorphic robotic hand with 19 disclosable self-healing finger joints. It is always adaptable and robust, easy-to-use and flexible.

Direct Drive Tech Diablo
DIABLO is a flexible two-wheeled robot and it is also an open development platform. The open development ecology able to provides perfect interfaces for various of applications.
- Flexibility: Self balance, controllable tilt angle up to 37 degree.
- Rough road Adaptation: Direct Drive leg impedance control, absorbs 60% impact force.
- Jump: Peak joint torque up to 17N.m, providing powerful burst output.
- Stability: 16-bit high-precision joint encoderaccuracy within 0.01 degrees.
- Composed Motion: Multiple control interface supports secondary development.

Robotnik SUMMIT-XL STEEL
SUMMIT-XL STEEL is a robotic platform for application development. It has a robust design and can carry up to 250 kg payload. The mobile platform has omnidirectional kinematics based on 4 high-power mechanum drive wheels. Each wheel integrates a brushless motor with a high precision odometer sensor. SUMMIT-XL STEEL can be configured with a wide range of sensors. It also has internal and external connectivity to add custom components easily.

GPU Workstation
- NVIDIA GeForce 3090 x2
- Intel Core i9-10900F CPU
- 64 GB RAM
- 4T storage

XSENS Awinda + MENUS Gloves
MTw Awinda is an easy to integrate wireless human motion tracker for real-time applications. The patented Awinda protocol ensures highly accurate time-synchronized data sampling (within 10 μs) in all connected MTw’s, which is essential for accurate joint angles.
- Easy to integrate using extended API.
- Providing highly accurate drift-free 3D orientation data.
- Data between multiple MTw's is time-synchronized to within 10μs using patented.

OptiTrack Prime 13W
- High-speed, low-latency tracking: From high-speed cameras featuring image-stopping global shutters and LEDs to a pipeline that processes data from photon to rigid body solve.
- Incredible range: OptiTrack cameras offer the best range in the industry, by huge margins. The long-range specialist Prime 41 is able to see a 16 mm passive marker from over 100’ away.
- Powerful, flexible rigid body tracking: OptiTrack’s worldwide reputation for easy to use tools is evident in every keystroke and mouse click within Motive’s robotics tracking solutions.

HTC Vive Pro Eye
Precision eye tracking combined with professional-grade sound and graphics—designed for studios, home offices, and VR users who require a premium immersive experience.
- Precision eye tracking powered by Tobii ®.
- Room-scale tracking up to 100m².
- Professional-grade graphics and sound.

Delsys Trigno Avanti
Trigno Avanti Mobile (TAM) is an EMG and movement assessment system to be used on the field, in the clinic, in the classroom, or in the lab where portability and quick setup is important. TAM provides real-time biofeedback and immediate print-ready reports including raw EMG, EMG RMS, IMU data, and muscle comparison ratios. TAM is compatible with Mobile EMG Suite, a collection of Android applications that measure EMG + IMU data while offering biofeedback tools, reporting features, and data logging.

Specim FX10 Spectral Camera
Specim FX10 camera series is designed for industrial and laboratory use. Specim FX10 cameras work in a line-scan mode in the visible and near-infrared (VNIR) area; Specim FX10 in the 400-1000 nm region, and the color optimized Specim FX10c camera in the 400-780 nm region.

Photoneo PhoXi 3D Scanner
It is suited for picking of objects that are the size of a soccer ball usually from bins with size of 40x60 centimeters. Another use of this device is in the inspection as well as 3D model creation. With its size and scanning range, it is optimal for being mounted on a small robot or collaborative robot.

ZED 2i AI Stereo Camera
- Combine long-range depth perception with AI to perceive your environment in 3D with up to a 120° wide-angle field of view.
- Featuring 9-DoF sensors for spatial and positional awareness. Factory calibrated on 6-axis with robotic arms.
- Use a highly reliable USB 3.0 type-C cable with thumbscrew locking connectors and ensure a secure interconnection for your systems.
- With its multiple mounting options and flat bottom, the ZED-2i can be easily integrated in any system and environment.
- Resistant to dust, water and humidity.

Intel RealSense D435i
- Neural Depth Sensing
- Spatial Object Detection
- Built-in Next-Gen IMU, Gyro, Barometer & Magnetometer 120° Wide-Angle FOV
- All-Aluminium Frame with Thermal Control
- Cable: 1.5m USB Type-C Cable Included (Optional : 0.3m, 3m, 5m, 10m cables also available)