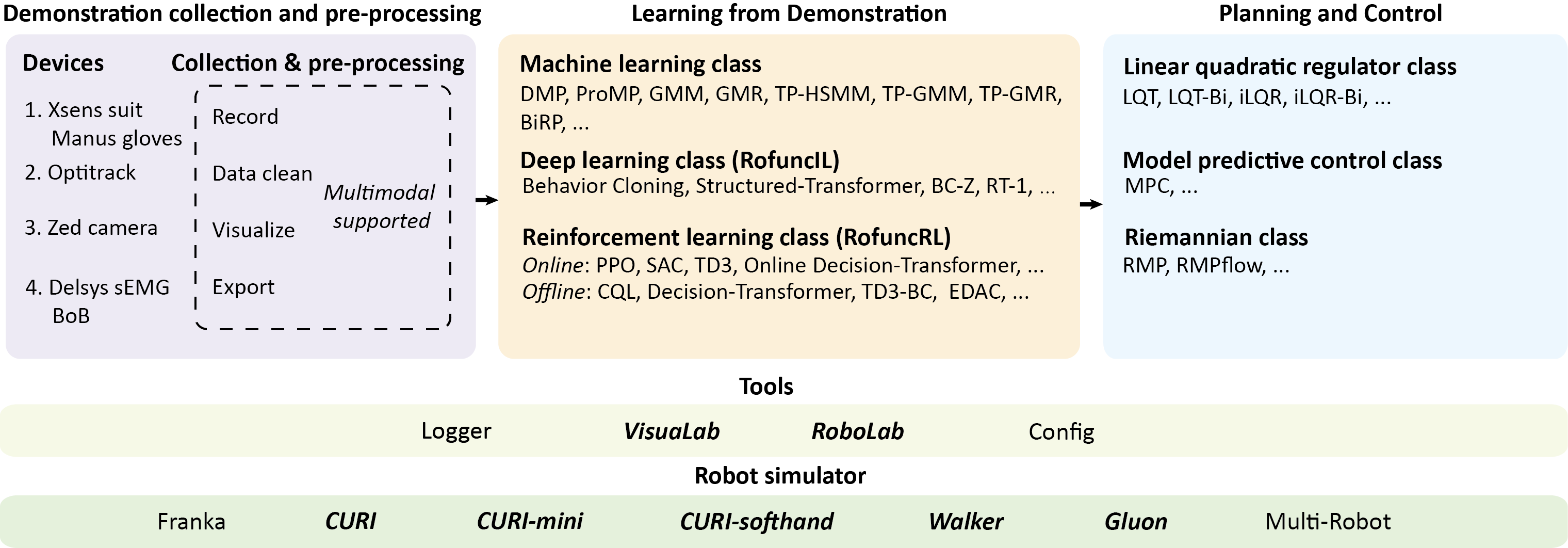
Rofunc package focuses on the Imitation Learning (IL), Reinforcement Learning (RL) and Learning from Demonstration (LfD) for (Humanoid) Robot Manipulation. It provides valuable and convenient python functions, including demonstration collection, data pre-processing, LfD algorithms, planning, and control methods. We also provide an Isaac Gym-based robot simulator for evaluation. This package aims to advance the field by building a full-process toolkit and validation platform that simplifies and standardizes the process of demonstration data collection, processing, learning, and its deployment on robots.