Nowadays, the development of collaborative robots for advanced interactions with humans and environments allows humans and robots to share the same space and collaborate in a more efficient and ergonomic way not only in industrial environments but in domestic scenarios. We propose to learn human-robot collaboration/interaction from human-human demonstration. Humans are expected to teach CURI the collaborative/interactive tasks by recording multi-modal data such as the IMU signals, global 3D position/rotation data, EMG signals, RGB-D images, etc., and generating the Cartesian trajectory profiles as well as the impedance profiles of robot end effectors offline. As a result, CURI can perform desired trajectories and impedance with whole-body impedance controller during task execution based on the feedback data of human partner.
Research 1: Whole-Body Impedance Control of a Humanoid Robot Based on Human-Human Demonstration for Human-Robot Collaboration
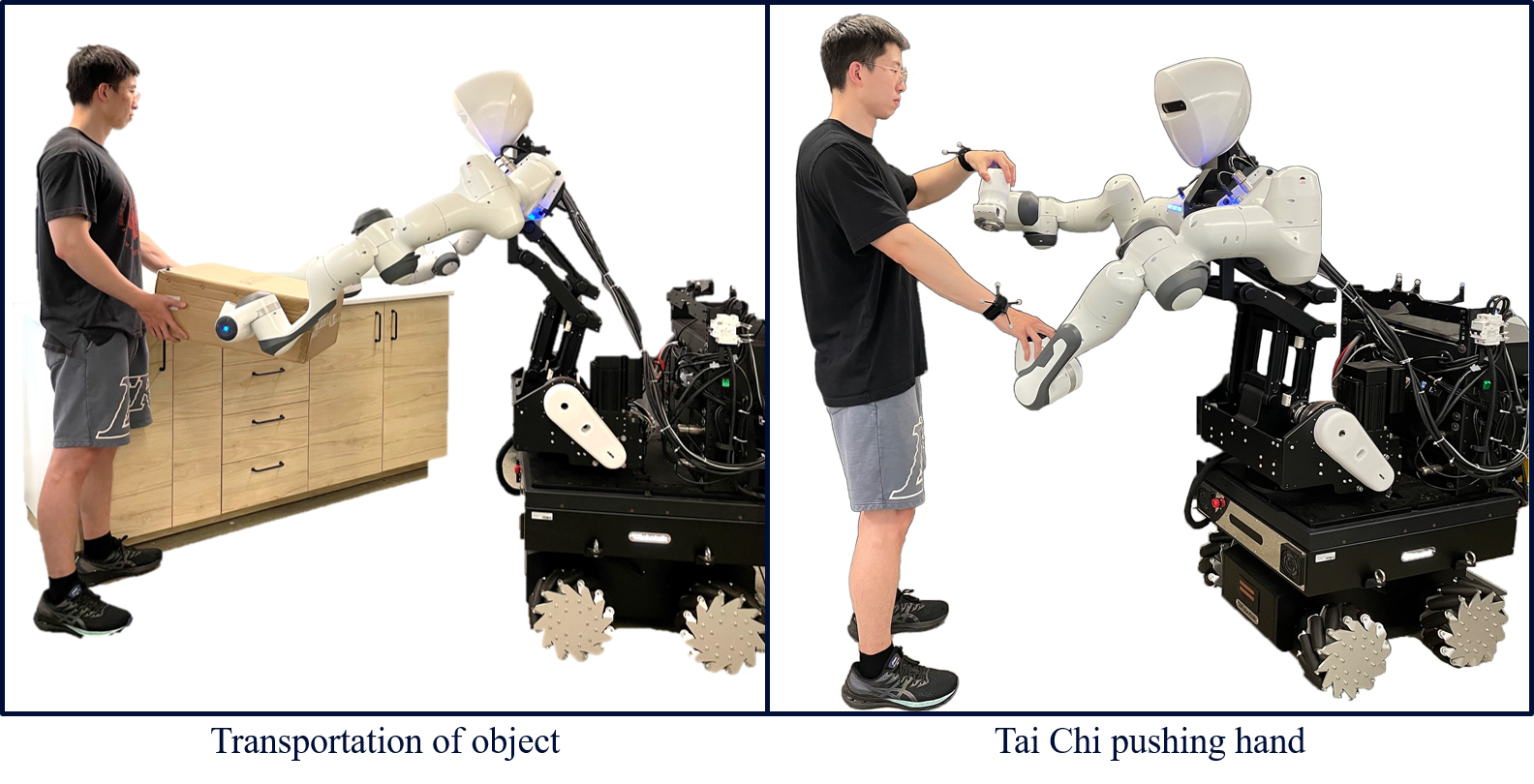
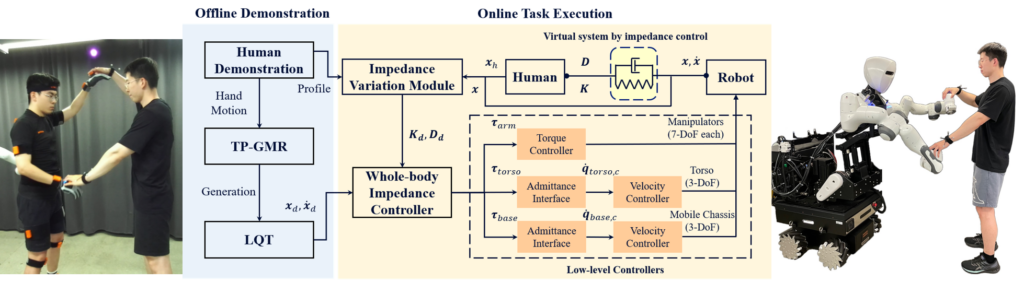
A whole-body impedance control method for the Collaborative dUal-arm Robot manIpulator (CURI) to adapt its physical behavior to the human’s motion in human-robot collaboration (HRC) while following the trajectories which are learned from the human-human demonstration is proposed. The novel whole-body impedance controller for CURI is firstly introduced to coordinate the joint output of each part to achieve the desired impedance in Cartesian space. Secondly, the collaborative tasks are captured from human-human demonstration and transferred to the motion representation of the robot via task-parameterized Gaussian Mixture Regression (TP-GMR). A linear quadratic tracking (LQT) method is then applied for trajectory planning. Simultaneously, by observing the physical behavior of demonstrators, a variable impedance control method is proposed for the robot to generate proper impedance by mimicking the human. Furthermore, an adaptive parameter based on the spatial displacement relationship between the robot and the human during the collaboration is considered and added to the impedance controller, which limits the robot from being too stiff at a close distance and turns the robot into rigid with a far spatial displacement. Experimental validation shows a good performance of the adaptive impedance method by displaying two types of confrontational Tai Chi pushing hand.
C. Li, R. Huang, J. Liu, S. Wang, M. Li and F. Chen, “Whole-Body Impedance Control of a Humanoid Robot Based on Human-Human Demonstration for Human-Robot Collaboration,” (2022) T-Mech (under review).